

整车控制器解读驾驶员意图:基于操作信号的解释与整车控制原理
说在前面
在现代汽车技术迅猛发展的背景下,整车控制系统成为汽车电子控制的中枢。而在这一系统中,整车控制器(Vehicle Control Unit,VCU)如何通过解析驾驶员的操作信号解读驾驶意图,是一项至关重要的技术。这不仅关系到车辆的安全性和驾驶体验,还在无人驾驶技术的发展中起着核心作用。
本篇文章旨在深入解析整车控制器如何通过驾驶员的操作信号来解读驾驶意图,并探讨其背后的技术原理。我们将进一步探讨无人驾驶智能车的运动控制系统、控制目标及其工作原理,以及线控制动在自动驾驶汽车中的关键作用。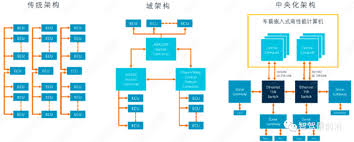
整车控制器的背景介绍
定义和基本概念
整车控制器(VCU)是车辆的电子控制单元,负责接收和处理来自车辆各部分的传感器信号,并发送指令以实现车辆的协调运行。它是现代汽车电子系统的核心之一,在纯电动汽车和混合动力汽车中尤为重要。
历史和发展
随着电子技术的进步,汽车控制系统的发展经历了从单一控制到集成控制的演变。早期的汽车主要依赖于机械控制,而现代汽车则广泛应用电子控制技术。整车控制器的出现,使得车辆能够更高效地管理动力系统、制动系统、能量回收以及其他子系统,大大提升了驾驶舒适性和安全性。
整车控制器的详细解读
驾驶员意图的主要依据
整车控制器通过一系列传感器,采集驾驶员的操作信号,并对这些信号进行分析,以解读驾驶员的意图。主要的操作信号包括:
- 加速踏板信号:驾驶员踩下加速踏板,通过角度传感器将该信息转换为电信号传输至VCU。
- 制动踏板信号:驾驶员踩下制动踏板,通过压力传感器或位置传感器将该信息发送给VCU。
- 方向盘旋转角度:通过方向盘角度传感器采集数据,反映驾驶员的转弯意图。
- 挡位状态:自动变速器的挡位信息也是VCU的重要输入信号之一。
- 其他控制开关:如灯光开关、雨刷开关等,这些辅助控制也会通过VCU进行统一管理。
信号处理与控制策略
整车控制器接收到驾驶员的操作信号后,通过内部算法对这些信号进行处理,并结合车辆当前状态(如速度、转向角、电机和电池状态等),生成适当的控制命令。主要的处理步骤包括:
- 信号采集:通过CAN总线或其他通信方式,将各传感器的信号传输至VCU。
- 信号滤波与校正:对采集到的信号进行滤波和校正,以去除噪声和误差。
- 意图解析:根据预设的控制策略,解析驾驶员的意图。例如,通过加速踏板的位置信号和制动踏板的力度信号,可以判断驾驶员是希望加速还是减速。
- 控制命令生成:生成相应的控制命令,如驱动电机的转矩指令、制动命令等。
- 执行反馈:通过执行器执行指令,并通过传感器监测执行效果,反馈至VCU进行闭环控制。

自动驾驶汽车的运动控制系统
在无人驾驶智能车中,运动控制系统的设计和控制目标尤为复杂,涉及的技术更为前沿。主要的控制目标包括:
- 路径跟踪:精确控制车辆沿预设路径行驶,确保车辆在各种工况下安全稳定。
- 障碍物避让:通过传感器实时检测环境中可能的障碍物,调整行驶路径避免碰撞。
- 优化能耗:在保证行驶任务完成的前提下,最优地管理能量分配,提高能效。
运动控制系统的组成主要包括传感器模块(如激光雷达、摄像头)、决策模块(路径规划与决策算法)和执行模块(电机控制器、转向系统、制动系统等)。各模块通过CAN总线或以太网进行通信和数据交换。
线控制动在自动驾驶中的应用
线控制动(Brake-by-Wire)是自动驾驶汽车中关键且技术难度较高的部分。其核心在于通过电子信号而不是传统的液压或机械方式来控制制动系统。线控制动系统的优势在于:
- 响应速度快:电子控制信号的传递速度远高于机械系统。
- 精确控制:能实现更加精确的制动力分配和控制。
- 简化设计:取消了传统的机械控制部件,使得系统更轻便,设计更简洁。
应用线控制动技术,可以大幅提升自动驾驶车辆在不同工况下的制动性能和能效。
相关Tips
- 定期维护:确保传感器和执行器的正常工作,定期检测和校准。
- 软件更新:及时升级整车控制器的软件,获取最新的控制策略和算法。
- 注意驾驶习惯:良好的驾驶习惯有助于延长整车控制系统的寿命。
- 学习反应特性:了解车辆在不同操作下的反应特性,提升驾驶安全性。
- 监控运行状态:通过车载诊断系统,随时了解整车控制系统的运行状态。
常见问题解答(FAQ)
- 整车控制器无法正常工作时会有什么表现?
表现可能包括车辆无法启动、加速或减速异常、仪表盘异常警告等。建议尽快联系专业维修人员。 - 线控制动系统安全吗?
线控制动系统经过多重冗余设计和严格测试,具备较高的安全性。同时,紧急情况下可以启用备份制动系统。 - 自动驾驶智能车的运动控制系统如何应对复杂路况?
通过融合多种传感器数据,实时更新路径规划,并采用先进的控制算法保证车辆在复杂路况下的安全行驶。
总结
整车控制器在现代汽车中扮演着至关重要的角色,通过解析驾驶员的操作信号,实时解读驾驶意图并协调各子系统的运行,使得车辆具有更高的安全性和驾驶体验。在无人驾驶智能车中,运动控制系统的设计和控制目标更加复杂,但在技术的发展和创新下,逐步实现了自动驾驶的目标。
未来,随着技术的进一步发展,整车控制器及相关系统将变得更加智能和可靠,继续推动汽车产业的进步。